マシンガイダンスシステム
概要
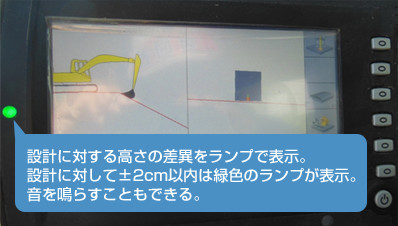
・TS・GNSSから得られる施工機械の位置情報と設計データの差異を車載モニターを通じてオペレータに提供するシステム。
オペレータはモニターの情報を見て手動で機械操作を実施する。
・GNSSのシステムをバックホウに取付けるケースが非常に多い。
◆効果
①丁張り作業・検測作業の必要がないため作業効率の向上と人件費の削減を図ることができる。
②オペレーターが面的に仕上がり高さを確認できることから出来形の精度が向上する。
モーターグレーダーによる路盤整正工

バックホウの法面整形作業。従来施工と情報化施工を比較した写真です。
左側の従来施工ですと、現地に20mピッチで法丁張りが設置してありオペレータが丁張りを目印にしたり補助作業員の合図をもとに掘削を実施しています。
それに対し情報化施工では、重機内のモニターをみてオペレータが施工を実施することから丁張り・補助作業員は不要となります。
結果として情報化施工を実施すると丁張り作業・検測作業の必要がないため作業効率の向上と人件費の削減を図ることができます。またオペレーターが測点以外の箇所も面的に仕上がり高さを確認できることから出来形の精度が向上します。
マシンガイダンスのシステム構成
GNSSを用いたバックホウマシンガイダンスのシステム構成です。
バックホウの後方にはGNSS受信機を取付けます。受信機では衛星からの位置情報を取得します。またバケット・アーム・ブーム・重機本体には、それぞれの傾きを検知するセンサーを取り付けてあり、キャビン内にはコントロールボックスというモニターが取付けてあります。
オペレーターはモニターの画面を見て、重機の現在位置、バケットの刃先の高さを確認することができ、ガイダンス画面に従って法面整形作業等を実施します。

マシンガイダンスのシステム構成
 バックホウマシンガイダンスの施工状況
バックホウマシンガイダンスの施工状況
法肩丁張りは一切設置されていない。丁張りレスの施工を実現。
 バックホウマシンガイダンスの施工状況
バックホウマシンガイダンスの施工状況
法肩丁張りは一切設置されていない。丁張りレスの施工を実現。
Warning: include(/home/marke/chiyoda-kiden.co.jp/public_html/wp-content/themes/lespaul/page-template/parts-koujinav.php): failed to open stream: No such file or directory in /home/marke/chiyoda-kiden.co.jp/public_html/wp-content/themes/chiyoda/page-machineguidence.php on line 67
Warning: include(): Failed opening '/home/marke/chiyoda-kiden.co.jp/public_html/wp-content/themes/lespaul/page-template/parts-koujinav.php' for inclusion (include_path='.:/opt/php-7.4.33-2/data/pear') in /home/marke/chiyoda-kiden.co.jp/public_html/wp-content/themes/chiyoda/page-machineguidence.php on line 67




")


